HRI-BioPsy Project
Home
Investigating Psychological (top-down) and Biological (bottom-up) Processes for Enhancing Human-Robot Interaction
HRI-BioPsy is an abbreviation for the above project title and is conducted at the Adaptive Systems Research Group, part of the University of Hertfordshire. HRI-BioPsy aims to shed more light on processes and factors that impact upon the "quality" or rapport of human-robot interaction. In the long run insights from this kind of research may contribute to a more principled understanding of what makes human-centric interaction work and, conversely, which kind or attributes of (robot) behaviour(s) will most likely lead to an interactional breakdown.

Potential factors indicating and impacting upon rapport in interaction
As point of departure in terms of factors that may give us some indication of the potential quality of interaction we will consider measures that have been proposed as behavioural indices of motor resonance such as measures for motor interference (see images below), motor priming, and motor contagion.


 Screenshots from previous experiments conducted by Qiming Shen measuring motor interference with different stimuli (from Shen et al. 2011)
Screenshots from previous experiments conducted by Qiming Shen measuring motor interference with different stimuli (from Shen et al. 2011)
On a slightly wider timescale efforts will be made to relate these comparatively static and restrictive measures with more dynamic measures that are better suited to turn-based formats of interaction.
Platform
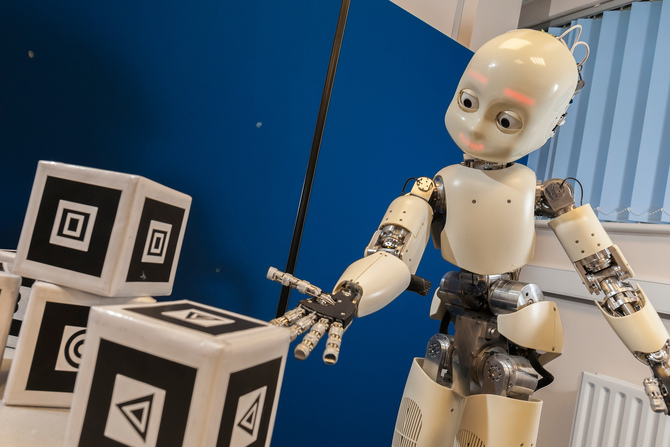
Whereas earlier experiments were performed with the KASPAR the new set of experiments will be conducted with the humanoid iCub, for which we developed a behavioural architecture within the EU FP7 project ITALK.
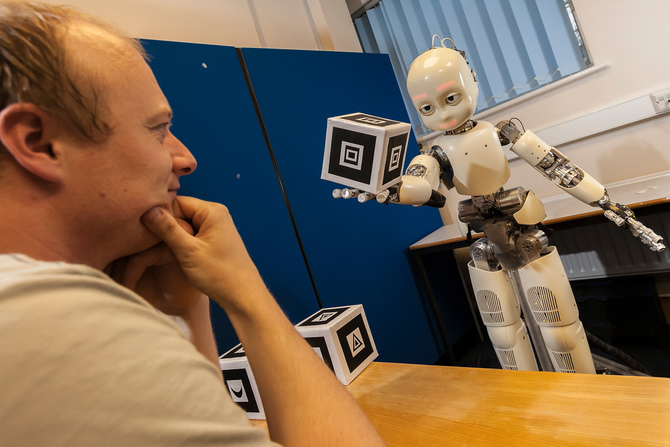
 Above two photos by Pete Stevens
Above two photos by Pete Stevens
Contact
Dr. Frank Förster
Adaptive Systems Research Group
Science and Technology Research Institute
University of Hertfordshire
College Lane, Hatfield, Herts AL10 9AB
f.foerster@herts.ac.uk